

I’m a mentor for our high school First Tech Challenge (FTC) robotics team. First is a great organization that runs robotics competitions for various age groups ranging from elementary to high school. FTC is a high school level competition where teams compete in autonomous and wirelessly controlled rounds.
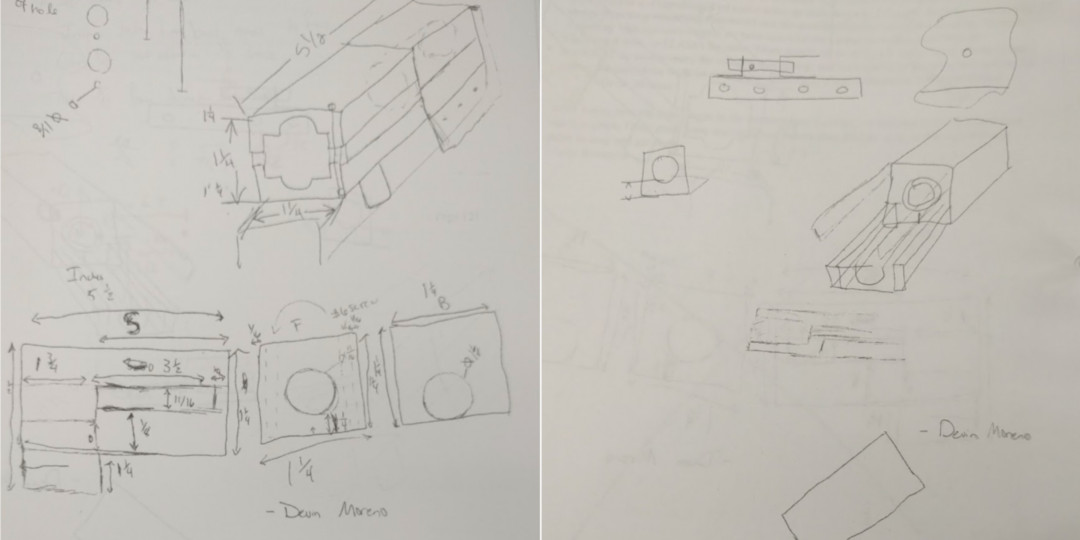
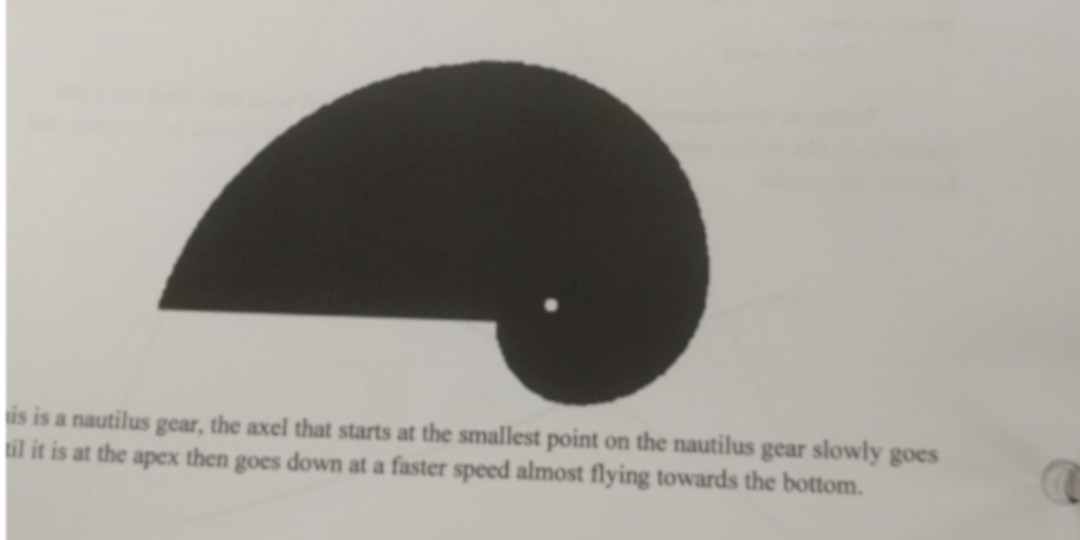
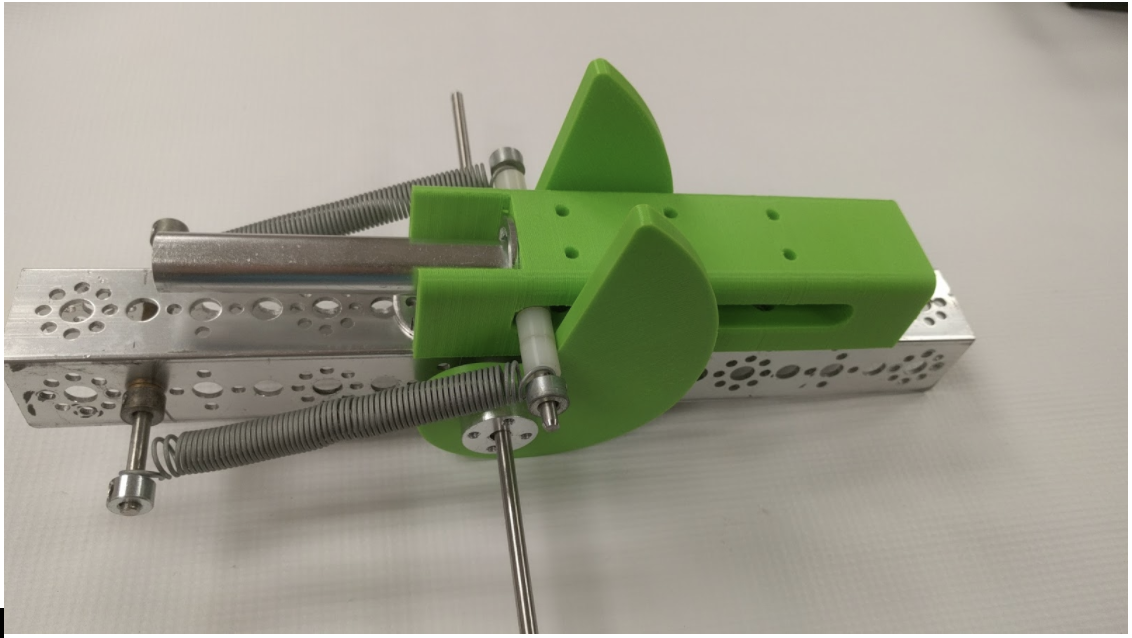
This year one of the tasks was to launch a wiffle ball through a goal approximately 30 inches high. We struggled most of the season to come up with a viable and original solution. Originality counts in First competitions, so we strive to be unique. Several of our students found a video of a cam and wondered if we could make this mechanism work in our application.